一般来说电机是没办法直接传递位置信号和速度信号的,如果想要准确地获取电机角度信息和速度信息来完成高精度的控制就必须依赖于采集角度的传感器件。这一类器件里有很多很多不同原理不同特性的传感,光电编码、霍尔传感等等。旋转变压器也是其中一种。
旋转变压器是一类很常见的角位置传感器,在伺服电机、PMSM电机应用中提供位置和速度反馈。如果从机械设备的角度看,旋转变压器由静止的定子和可移动的转子构成,从电气角度来看,它可以看作由为转子供电的变压器和用于测定角度的辅助变压器构成。在工业环境中旋转变压器的信号输出可以不受振动粉尘油污的影响,适合在恶劣环境下使用,另外旋转变压器能提供单圈的绝对位置,但需要额外的电子装置进行信号处理和记录旋转的圈数。旋转变压器和光电编码器在机器人应用上都很常见,在笔者见过的大部分KUKA、ABB机器人的伺服电机上都配备了旋转变压器。
电气角度下的旋转变压
上面说到,从电气角度看,旋转变压器由为转子供电的变压器和用于测定角度的辅助变压器构成。旋转变压器的第一个变压器采用同心设计,在功能上与电机运动的角度值无关。第二个变压器会随电机运动的角度变化,由定子绕组和转子绕组构成。这两个变压器元件的绕组设计会使凹槽中的绕组数量与正弦值相对应。
如果给转子绕组通电,则产生正弦磁通量,它将以转子和定子相对角度位置函数的形式在定子线圈中产生电压。两个电压的振幅对应于正弦或余弦。因此,可以使用合适的求值电路获取绝对角度数据。
(图源:Jamagawa)
旋转变压器的极对数表示了转子和定子绕组的正弦分布在一次旋转中的重复频率。极对数越高,旋转变压器的机械精度越高。对于多极对,绝对角度数据可能会丢失,但在对旋转变压器信号进行数字转换后,会获得更高的分辨率。
旋转变压器和编码器的取舍
二者作为角位置传感器,都是通过将机械运动转换为电信号来测量轴的旋转位置。编码器提供的是数字输出信号,而旋转变压器提供的是模拟输出信号,因此需要旋转变压器的输出要进行轴角-数字转换。与编码器相比,旋转变压器在极端环境条件(如高温以及冲击和振动)下更加可靠,这也是为什么在很多环境相对严苛的工业机器人应用里旋转变压器出场率很高的原因。

(图源:TE)
旋转变压器可以用作增量和绝对编码器的替代品,但这个取舍还是取决于应用场合,一是环境条件,而是系统的控制电子装置。虽然旋转变压器更适合严苛的环境,但是编码器不可否认的具有高精度,并且集成到控制电子装置的过程相对来说也不那么复杂。
数字转换成为旋转变压器
上面说到的两个方向,都提到了一个词,旋转变压器的数字转换。旋转变压器的数字转换需要用到RDC,也就是旋变数字转换器。旋变数字转换器在旋变器和系统主控芯片之间实现连接,采用旋转变压器输出的正弦和余弦信号解码电机轴的角位置和旋转速度。
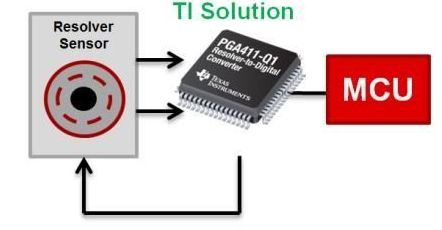
(图源:TI)
大部分的旋变数字转换会采用Type-II跟踪环路计算位置和速度。RDC同步采样两路输入信号,提供数字化数据给跟踪环路。在很多工业应用场景中,噪声环境会极大影响RDC采集的数据,在正弦和余弦信号上出现高频噪声。如果出现这种情况,可以在靠近RDC的地方放置一个差分低通滤波器,即便是最简单的差分低通滤波器也可以有效抑制高频噪声。
旋转变压器和旋变数字转换器一同使用时,可以给电机控制应用提供高精度和稳定的位置/速度测量信息,泛一点说是对电机控制能力极大地增强。但是我们也看到了这个精准的测量必须考虑到所有可能的误差,在信号链的设计上尽量规避误差的产生。














