



无刷电机驱动器是杰美康科技采用国际最新电机专用数字处理器DSP 为核心配以高速度数字逻辑芯片高品质功率模块,组成具有集成度高、体积小、保护完善、接线简洁明了、可靠性高等一系列优点。该驱动器可提供:操作面板速度设定,外部模拟电压调速、外电位器调速,脉宽调速等功能。具有操作安全、调速方式灵活多样、转速即时显示、保护功能齐全等特点 。

主要特点:
1.调速范围宽
2.低噪音,高效率,运行平稳
JBL系列无刷电机采用了4极和8极转子设计,机型号有42、57、60、70、80、86、110;0.1NM到6NM的连续转矩;高性能钕硼磁钢提供3倍 以上的峰值扭距。
驱动器接口信号描述(JDB-01系列)
| 电源输入端 | 典型接线图(JBD-01系列) | ||||
| 引脚序号 | 引脚名 | 中文定义 | 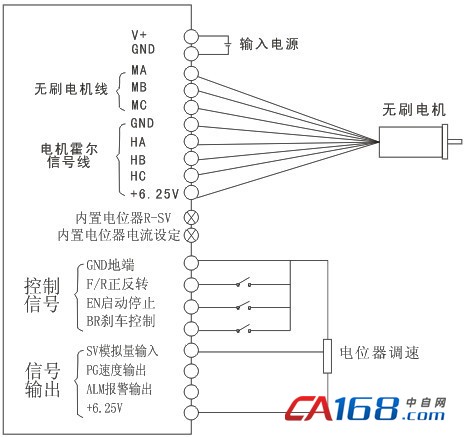 |
||
| 1 | V+ | 直流电源正输入 | |||
| 2 | GND | 直流电源负输入 | |||
| 电机输入端 | |||||
| 引脚序号 | 引脚名 | 中文定义 | |||
| 1 | MA | 电机A相 | |||
| 2 | MB | 电机B相 | |||
| 3 | MC | 电机C相 | |||
| 4 | GND | 地线 | |||
| 5 | HA | 霍尔信号A相输入端 | |||
| 6 | HB | 霍尔信号B相输入端 | |||
| 7 | HC | 霍尔信号C相输入端 | |||
| 8 | +6.25 | 霍尔信号的电源线 | |||
| 电源和电机接线端 | 霍尔传感器信号端 | |||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||
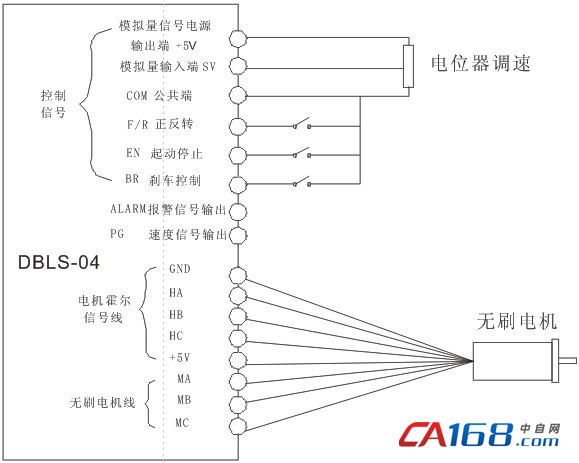
| 驱动器控制端子 | 典型接线图(JDB-04-09系列) | |||||||||||||||||||||||||||||||||||||||
|
 |
调速方式
本驱动器提供以下两种调速方式用户可任选一种:
高压JB-04-09系列可在面板工作模式下调速,通过+,-按键来调节无刷电机不同的速度。
外部输入调速
将外接电位器的两个固定端分别接于驱动器的GND和+6.25v一端,将调节端接于SV端即可使用外接电位器(10K~50K)调速,也可以通过其它的控制单元(如PLC、单片机等)输入模拟电压到SV端实现调速(相对于GND),SV端口的接受范围为DC OV~+5V,对应电机转速为0~额定转速。
该驱动器也可以使用外部数字信号调整
在SV 与GND 之间可以施加幅值为5V,频率为 1KHz~2KHz 的脉宽数字信号(PWM)进行调速,电机转速受其占空比线性调节。这时可以通过调整 R-SV 电位器对SV 数字信号幅值进行0~1.0 比率 衰减处理,一般将 R-SV 调到1.0,对SV 输入数字信号不做衰减处理。
电机运行/停止控制(EN)
通过控制端子EN相对于GND的通、断可以控制电机的运行和停止。当端子断开时电机运行反之电机停止。使用运行/停止端控制电机停止时,电机为自然停车,其运动规律与负载惯性有关。
电机正/反转控制(F/R)
通过控制端子F/R与端子GND的通、断可以控制电机的运转方向。当F/R与端子GND不接通时,电机顺时针运行(面对电机轴),反之则电机逆时针方向运转;为避免驱动器的损坏在改变电机转向时,应先使电机停止运动后,再操作改变转向,避免在电机运行中进行运转方向操作。
制动停机(BREAK)
通过控制端子BK扮与端子GND的通、断可以控制电机的制动停机。当控制端子BK与端子GND断开时,电机运行,接通时电机快速制动停止,制动停机比自然停机快,具体停机时间与用户系统的负载惯量有关。因制动停机对电气和机械均有冲击,如无特殊停机要求应采用自然停机。
电机转速信号输出(PG)
速度脉冲输出,该端口为OC 输出(30V/10mA max),要得到信号应与电源之间接 3KΩ~10KΩ上拉电阻。该端将输出频率与电机转速成正比的固定脉 宽 (50uS)负脉冲串,电机每转的输出脉冲个数为3 x N, N 为电机的极数。例:2对极即四极电机每转12个脉冲.当电机转速为500转/分时端子PG的输出脉冲为6000个。
报警输出
驱动器报警输出,该端口为OC 输出(30V/10mA max)。要得到信号应与电源之间接 3KΩ~10KΩ上拉电阻。报警时该端与GND 导通(低电平),同时驱动器自行停止工作处于报警状态。
驱动器故障
驱动器内部出现过压或过流时驱动器进入保护状态,驱动器会自动停止工作,电机停止,驱动器上的蓝灯为闪砾,只要将使能端重新复位(即EN与GND断开)或是断电,驱动器才能解除报警。发生此故障请检查电机接线。