详细资料:
JMC-2410是一款PCI接口4轴运动控制卡;使用了专用的运动控制ASIC芯片,支持板卡ID设置、动态修改目标位置、支持非对称加减速等功能。
可接受编码器信号,并提供位置锁存函数,并可产生中断;支持位置比较(大于、等于、小于)功能,比较条件满足时可产生比较输出信号,并且可产生中断。
| 规格 |
应用范围 |
|
1,32位32MHz3.3/5.0 OV PCI标准协议
2,单卡可控制4轴
3,最大脉冲输出频率5M PPS,支持T型曲线
4,S型速度曲线加速/减速
5,支持运行中改变速度(飞行加/减速)
6,28bit位置计数器,计数范围:-134.217.728 to
+134.217.727
7,内置位置比较器,条件满足可产生中断,并支持比较输出
8,支持中断功能
9,支持位置锁封,可产生中断
10,支持任意两轴间直线插补
11,支持编码器输入
12,对限位开关,原点开关,索引信号,INP,ERC,ALM有专
门的I/O接口
13,支持手摇轮输入
14,支持板号设置,同一系统可支持16张板卡
15,20路开集电极非隔离数字输出(DO)
16,20路隔离数字输入(DI)
|
1,半导体相关生产设备
2,SMT相关生产设备
3,LCD相关生产设备
4,激光加工设备
5,机器设觉及自动化检测设备
6,生物医学自动检测,处理设备
7,工业机器人
8,专用数控设备
|
信号连接
脉冲信号和方向信号输出
各轴的OUT 和 DIR 输出口是用于输出脉冲和方向信号,其输出格式可以由程序设定成CW/CCW 双脉冲模式或脉冲+方向模式,用户可通过设定 J1-J8 跳线来设定脉冲为差分输出或 集电极开路输出两种方式
| 下表为接口CN7的脉冲输出信号表: |
OUT/DIR接口的工作原理 |
| CN7引脚号 |
信号 |
说明 |
CN7引脚号 |
信号 |
说明 |
| 1 |
OUT1+ |
第1轴脉冲信号 |
35 |
OUT3+ |
第3轴脉冲信号 |
| 2 |
OUT1- |
36 |
OUT3- |
| 3 |
DIR1+ |
第1轴脉冲信号 |
37 |
DIR3+ |
第3轴脉冲信号 |
| 4 |
DIR1- |
38 |
DIR3- |
| 5 |
OUT2+ |
第2轴脉冲信号 |
39 |
OUT4+ |
第4轴脉冲信号 |
| 6 |
OUT2- |
40 |
OUT4- |
| 7 |
DIR2+ |
第2轴脉冲信号 |
41 |
DIR4+ |
第4轴脉冲信号 |
| 8 |
DIR2- |
42 |
DIR4- |
|
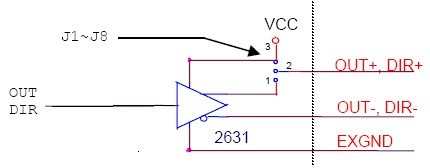 |
如果脉冲输出为单端输出模式,则 OUT-和 DIR-作为脉冲和方向信号的输出端。OUT 和 DIR 端的电流由PCI接口的 5V 提供。
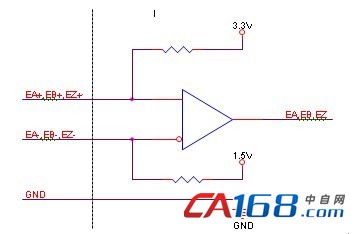
编码器输入信号EA,EB和EZ
编码器输入信号包括 EA、EB 和 EZ,每个轴都有三对差分的 A 相、B 相和 Z 索引信号,EA 和 EB 用来进行位置计数,EZ 可用作原点信号。每对差分输入信号将被转化成 EA、EB、EZ 的TTL 电平信号。
| 下表为编码器输入信号引脚号和说明: |
EA,EB,EZ信号在PCI-9024内部的原理,如下图所示 |
| CN5引脚号 |
信号 |
说明 |
CN5引脚号 |
信号 |
说明 |
| 3 |
EA1+ |
第一轴A相信号 |
12 |
EA3+ |
第三轴A相信号 |
| 4 |
EA1- |
13 |
EA3- |
| 5 |
EB1+ |
第一轴B相信号 |
14 |
EB3+ |
第三轴B相信号 |
| 6 |
EB1- |
15 |
EB3- |
| 7 |
EZ1+ |
第一轴Z相信号 |
16 |
EZ3+ |
第三轴Z相信号 |
| C |
EZ1- |
17 |
EZ3- |
| 21 |
EA2+ |
第二轴A相信号 |
30 |
EA4+ |
第四轴A相信号 |
| 22 |
EA2- |
31 |
EA4- |
|
 |
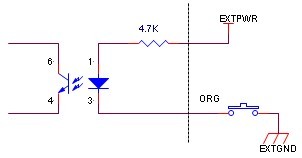
原点开关信号
原点信号输入用于检测该轴的原点,可通过用户软件设定回原点模式。其内部电路滤波电路,可以过滤小于噪声,以提高系统的可靠性。
| 原点信号和轴如下表所示 |
原点信号输入原理图如下图所示 |
| CN7引脚 |
信号 |
说明 |
CN7引脚 |
信号 |
轴 |
| 25 |
ORG1 |
第一轴原点信号 |
59 |
ORG3 |
第三轴原点信号 |
| 32 |
ORG2 |
第二轴原点信号 |
66 |
ORG4 |
第四轴原点信号 |
|
 |
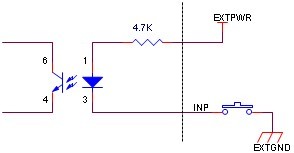
到位信号INP
到位信号来自伺服电机驱动器,指示位置误差为零,INP信号(到位信号)主要时用于伺服接口的专用输入信号,此信号被设置为有效时,如果正在输出脉冲的过程中脉冲输出完成后, 还必须等INP 信号出现,才能进入停止状态。
| 到位信号,引脚号和轴号对照表如下表所示 |
INP信号输入原理图如下所示 |
| CN7引脚号 |
信号 |
轴号 |
CN7引脚号 |
信号 |
轴号 |
| 20 |
INP1 |
第一轴伺服到位信号 |
54 |
INP3 |
第三轴伺服到位信号 |
| 27 |
INP2 |
第二轴伺服到位信号 |
61 |
INP4 |
第四轴伺服到位信号 |
|
 |
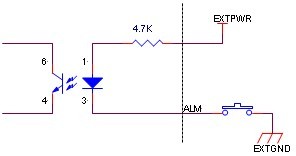
伺服报警信号ALM
此信号来自伺服电机驱动器的报警输出信号。信号有效时,PCI-9024将停止输出脉冲。
| 伺服报警信号,引脚号和轴号对照如下表 |
伺服报警信号输入原理如下图所示 |
| CN7引脚号 |
信号 |
说明 |
CN7引脚号 |
信号 |
说明 |
| 19 |
INP1 |
第一轴报警信号 |
53 |
INP3 |
第三轴报警信号 |
| 26 |
INP2 |
第二轴报警信号 |
60 |
INP4 |
第四轴报警信号 |
|
 |
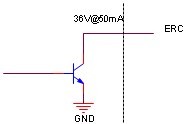
误差清除信号ERC
误差清除信号用于向伺服电机驱动器发出清除内部误差计数器命令;在下面情况在,PCI-9024输出有效地ERC信号:1,查找原点完成;2,极限开关有效;3,告警ALARM信号使运动轴停止;4,紧急停止。
| ERC信号,引脚号和轴号对照如下表 |
ERC信号原理如下图所示 |
| CN7引脚号 |
信号 |
说明 |
CN7引脚号 |
信号 |
说明 |
| 13 |
ERC1 |
第一轴误差清除信号 |
47 |
ERC3 |
第三轴误差清除信号 |
| 14 |
ERC2 |
第二轴误差清除信号 |
48 |
ERC4 |
第四轴误差清除信号 |
|
 |
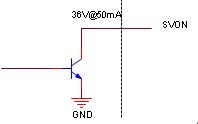
伺服使能信号SVON
该信号用于控制伺服驱动器的使能端你,低电平有效
| SVON信号名,针脚名和说明对照 |
SVON信号名,针脚名和说明对照 |
| CN7引脚号 |
信号 |
说明 |
| 21 |
RDY1 |
第一轴READY信号 |
| 28 |
RDY2 |
第二轴READY信号 |
| 55 |
RDY3 |
第三轴READY信号 |
| 62 |
RDY4 |
第四轴READY信号 |
|
 |
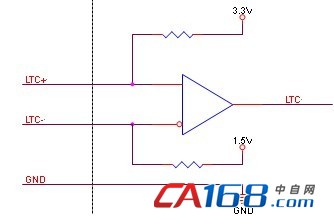
位置锁存输入信号LTC
JMC-2410 卡每一轴都提供一个位置锁存输入信号 LTC; 5V 的 LTC 信号会触发位置锁存器,捕获当前编码器位置或当前指令位置。
| LTC信号,引脚号和轴号对照如下表所示 |
LTC信号输入原理图如下所示 |
| CN5引脚 |
信号 |
轴号 |
CN5引脚 |
信号 |
轴号 |
| 34 |
LTC1+ |
1 |
19 |
LTC3+ |
3 |
| 9 |
LTC1- |
1 |
20 |
LTC3- |
3 |
| 27 |
LTC2+ |
2 |
17 |
LTC4+ |
4 |
| 28 |
LTC2- |
2 |
18 |
LTC4- |
4 |
|
 |
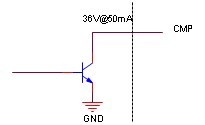
位置比较输出信号CMP
JMC-2410卡每个轴配有1个位置比较输出接口,通过软件使能后,可分别设置触发条件,当某非轴的命令寄存器内的数值或编码器内数值触发条件时,硬件自动在CMP1-CMP4输出电平信号
| CMP信号,引脚号和轴号对照表如下表所示 |
CMP信号输出原理图如下图所示 |
| CN7引脚号 |
信号名 |
| 15 |
CMP1 |
| 16 |
CMP2 |
| 49 |
CMP3 |
| 50 |
CMP4 |
|
 |
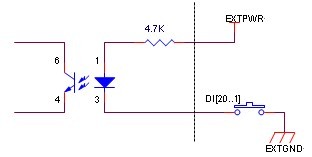
通用数字输入信号DI
JMC-2410提供了20路隔离数字输入接口,供用户使用
| 通用数字输入信号,引脚号和轴号如下表所示 |
通用数字输入信号原理图如下图所示 |
| CN7引脚 |
信号名 |
CN6引脚 |
信号名 |
CN6引脚 |
信号名 |
| 17 |
DI1 |
1 |
DI5 |
9 |
DI13 |
| 18 |
DI2 |
2 |
DI6 |
10 |
DI14 |
| 51 |
DI3 |
3 |
DI7 |
11 |
DI15 |
| 52 |
DI4 |
4 |
DI8 |
12 |
DI16 |
| |
|
5 |
DI9 |
13 |
DI17 |
| |
|
6 |
DI10 |
14 |
DI18 |
| |
|
7 |
DI11 |
15 |
DI19 |
| |
|
8 |
DI12 |
16 |
DI20 |
|
 |
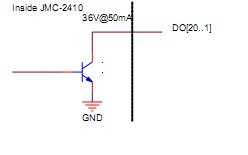
通用数字输出信号DO
JMC-2410提供了20路隔离的开集电极输出
| 通用数字输出信号,引脚号和轴号如下表所示 |
通用数字输出信号原理图如下图所示 |
| CN7引脚 |
信号名 |
CN6引脚 |
信号名 |
CN6引脚 |
信号名 |
| 9 |
DO1 |
21 |
DO5 |
29 |
DO13 |
| 10 |
DO2 |
22 |
DO6 |
30 |
DO14 |
| 43 |
DO3 |
23 |
DO7 |
31 |
DO15 |
| 44 |
DO4 |
24 |
DO8 |
32 |
DO16 |
| |
|
25 |
DO9 |
33 |
DO17 |
| |
|
26 |
DO10 |
34 |
DO18 |
| |
|
27 |
DO11 |
35 |
DO19 |
| |
|
28 |
DO12 |
36 |
DO20 |
|
 |



