



JMC-5400是一款PCI接口4轴运动控制卡;具有两级缓冲寄存器,可实现连续插补、支持硬件直线、圆弧插补、参数计算、手轮输入、飞行加/减速处理、多轴直线插补、多卡多轴同步、板卡ID设置、动态修改目标位置、支持非对称加减速等功能,可接受编码器信号,并提供位置锁存函数。捕获当前位置信号过程由硬件高速完成;支持位置比较(大于、等于、小于)功能,比较条件满足时可产生比较输出信
号,并且可产生中断。
| 规格 | 应用范围 |
| 1,32位32MHz3.3/5.0 OV PCI标准协议 2,单卡可控制4轴 3,最大脉冲输出频率9.8M PPS 4,支持T型速度曲线,S型速度曲线加速/减速 5,支持运行中改变速度(飞行加/减速) 6,28bit位置计数器, 7,支持位置比较器,可产生中断,并支持比较输出 8,支持中断功能 9,支持位置锁封,可产生中断 10,支持任意两轴圆弧插补 11,支持编码器输入 12,对限位开关,原点开关,索引信号,INP,ERC,ALM有专 门的I/O接口 13,支持手摇轮输入 14,支持板号设置,同一系统可支持16张JMC5400 15,16路开集电极非隔离数字输出(DO) 16,16路隔离数字输入(DI) |
1,半导体相关生产设备
|
信号连接
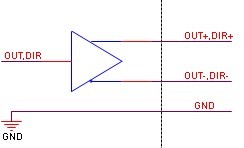
| 脉冲信号和方向信号输出 各轴的OUT和IR输出口是用于输出脉冲和方向信号,其输出格式 可以有程序设定成CW/CCW双脉冲模式后脉冲+方向模式 如果脉冲输出为单端输入模式,则OUT-和DIR-作为脉冲和输出信 号的输出端,使用CN1上的5V来作为控制信号的电源。 |
编码器输入信号EA,EB和EZ 编码器输入信号包括EA,EB和EZ,每个轴都有三对差分 A相,B相,Z索引信号 EA和EB用来进行位置计数,EZ可用作原点信号,每对差 分输入信号将被转化成EA,EB,EZ的TTL电平信号,下表为 编码器输入信号引脚号和说明: |
 |
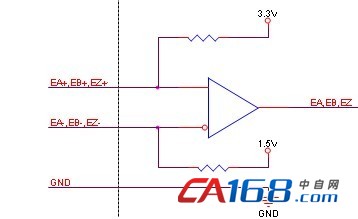 |
编码器输入信号接线方法如下:
|
差分输入模式 |
单端输入模式 在此模式下,输入信号接到差分输入的EA+/EB+/EZ+端。EA-/EB-/EZ-端 悬空。 |
 |
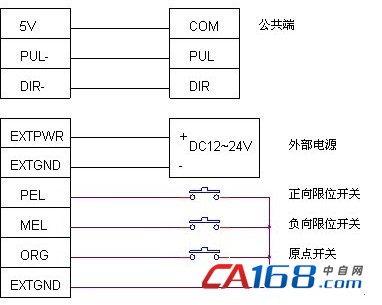 |
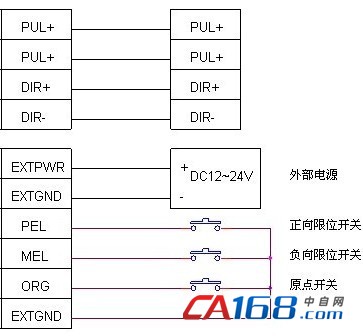
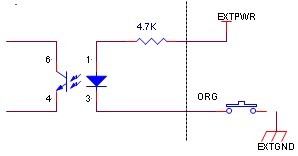
| 原点开关信号 原点信号输入用于检测该轴的原点,可通过用户软件设定回原点模式,其内部有滤波电路,可以过滤小于噪声,以提高系统的可靠性。 原点信号输入原理图如下: |
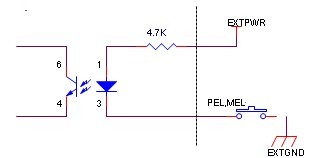
正反方向限位信号PEL/MEL 每一轴都有两个限位信号,PEL(正限位)和MEL(限位)用户可通过S1拨码开关设置限位信号的有效电平未选择原点开关为常闭方或者常开方式。 EL信号输入原理图如下所示: |
 |
 |
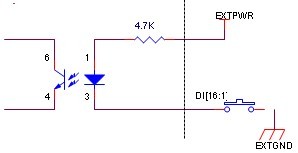
| 通用输入信号DI JMC-5400提供了16路隔离数字输入接口,供用户使用。 通用数字输入信号输入原理图如下图所示: |
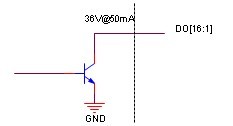
通用输出信号DO JMC-5400提供了16路非隔离的开集电极(OC)输出 通用数字输出信号原理图如下所示: |
 |
 |
|
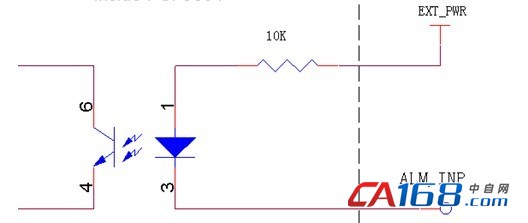
ALM,INP输入 |
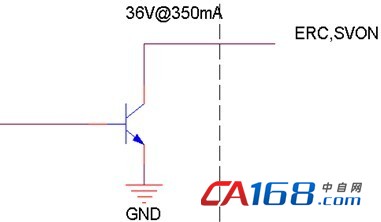
ERC和SVON ERC和SVON为非隔离的集电极开路(OC)输出,原理图如下: |
 |
 |
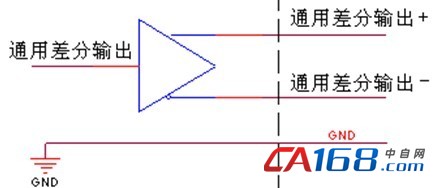
| 通用差分输出 JMC-5400内部的通用差分输出原理图如下: |
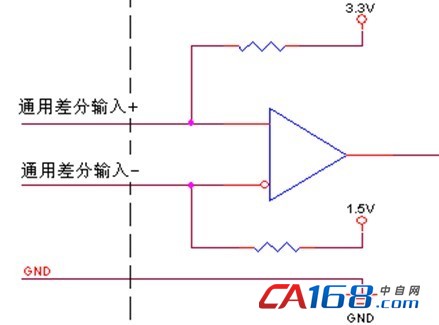
通用差分输入 通用差分输入示意图如下: |
 |
 |
LTC和CLR信号
LTC(锁存信号)和CLR(计数器清零)信号为TTL输入
V(IH)最小值为2V,V(IL)最大值为0.8V