3深海作业机器人模型
(1)深海作业机器人动力学模型
设机器车重心和几何中心重合,接地段的土壤特性为各向同性,履带接地段的负荷和土壤分布为均匀分布。
当机器车直线运行时,得单履带车体模型:
(3)
式中,M-深海机器人单侧模型质量,kg;J-履带驱动轮相对于转轴的转动惯量,kg·m2; ω-履带的转动角速度,rad/s;FxL-履带与海底地面间的附着力,N;FyL-履带的压实阻力,N;FtL-履带的推土阻力,N;Fw-深海机器人海水阻力,N;TmL-左履带马达驱动力矩,N·m;R-驱动有效半径,m。
(2)液压传动系统模型
在机器车行驶系统中采用变量泵-定量马达的容积调速回路。其中,电控变量泵由电液比例方向阀控制液压缸改变柱塞泵斜盘倾角的方式改变柱塞泵的排量,从而实现液压系统的流量控制。电液比例方向阀数学模型,采用电-U转变为阀芯的位移量xv。机械转换元件直接驱动阀芯运动,从而将输入电压信号
比例电磁铁控制线圈的端电压增量方程:
ΔU(s)=LsΔI(s)+(Rc+Rp)ΔI(s)+Kesxv(s) (4)
衔铁组件的动态力平衡方程:
KIΔI(s)=mTs2xv(s)+BTsxv(s)+(ks+ky)xv(s)+T(s) (5)
阀芯动态力平衡方程:
T(s)=[mvs2+Bvs+(Kv+Kfv)]xv(s) (6)
式中,L-线圈电感,H;Rc,Rp-线圈和放大器内阻,Ω;Ke-线圈感应反电动势系数,v;KI-比例电磁铁电流力增益,N/A;mT-衔铁组件质量,kg;BT-阻尼系数,N·s/m;Ks-衔铁组件的弹簧刚度,N/m;mv-阀芯质量,kg;Bv-阀芯的粘性阻尼系数,N·s/m;Kv-阀芯对中弹簧刚度,N/m;Kfv-作用于阀芯上的稳态液动力刚度系数,N/m;ΔI-线圈电流,A;Ky-比例电磁铁的位移力增益和调零弹簧的刚度之和,N/m;T-衔铁外负载,N。
比例方向阀的模型框图如图3所示。
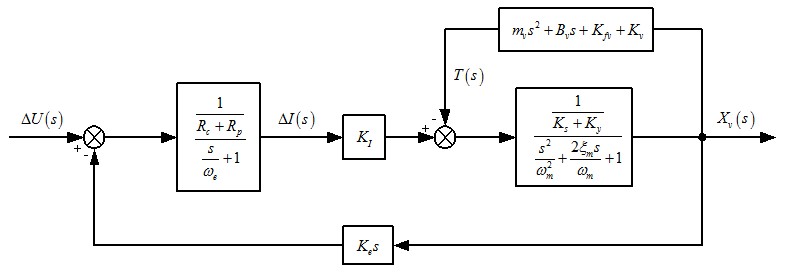
图3 比例阀传递函数框图














